CONTENIDOS:
¿Qué son los operadores mecánicos?
Funciones de los operadores mecánicos
Características y dibujos de cada uno
Tipos de operadores mecánicos incluya dibujos y función
Importancia de ellos en la vida cotidiana
Palancas
Transmisión de movimiento giratorio
Mediante fricción
Mediante correa
Reductor de velocidad
Conversión de un movimiento circular en lineal
Hilos
Operadores que elevan
Objetos en forma periódica
LEGO (Subtitulo)
¿Qué es lego?
¿Perfiles en lego?
Ejemplo de proyectos en lego
Lego en la educación
¿Qué son los operadores mecánicos?

Se entiende por operador mecánico cualquier objeto o conjunto de objetos que sean capaces de realizar una función tecnológica permitiendo al ser humano producir, transformar o controlar un movimiento o convertir una fuerza en un movimiento realizando el menor esfuerzo.
Funciones de los operadores mecánicos

Los operadores mecánicos son operadores que van conectados entre si para permitir el funcionamiento de una máquina, teniendo en cuenta la fuerza que se ejerce sobre ellos. Los operadores mecánicosconvierten la fuerza en movimiento, el conjunto de varios operadores se denomina mecanismo.
Características y dibujos de cada uno
Tipos de operadores mecánicos
Los operadores mecánicos convierten la fuerza en movimiento.
Se divide en:
- Mecanismo de transmisión lineal
- Mecanismo que transmite movimiento
- Operadores que acumulan energía
Mecanismo de transmisión lineal:
Tanto como el movimiento de entrada y la de salida son lineales, tienen como objeto cambiar el sentido de la fuerza (palanca polipasto) para cambiar el sentido de la fuerza (polea) y varias el punto de la aplicación (palanca).
Palanca:
Una palanca es la máquina simple de transmisión lineal que puede girar alrededor de un punto de apoyo. En esta barra hasta un punto de aplicación de la fuerza (F), y un punto de aplicación de la resistencia, (R). Para resolver una palanca en equilibrio empleamos la expresión llamada ley de la palanca: F.d=R.r tenemos 3 tipos de palancas:
Palancas de primer género o de primer grado
Tiene el punto de apoyo entre la fuerza y la resistencia

palancas de segundo genero de segundo grado Tienen la resistencia entre el punto de apoyo y la fuerza.

Palancas de tercer género o de tercer grado
Son las que tienen la fuerza entre el punto de apoyo y la resistencia.Es una balanza de segundo grado.

Polea:
La polea es una rueda que gira libremente alrededor de su eje, esta provista de un canal en su superficie para que sirva de guía a una cuerda, correa o cadena. A la que recibe o a la que le da el movimiento.
Tipos de polea
Polea simple: Polea simple fija, polea simple móvil
Polea compuesta: Polipasto
Polea simple fija
En las poleas fijas, las tensiones (fuerzas) a ambos lados de la cuerda son iguales (T1 = T2) por lo tanto no reduce la fuerza necesaria para levantar un cuerpo. Sin embargo permite cambiar el ángulo en el que se aplique esa fuerza y transmitirla hacia el otro lado de la cuerda.

Polea simple móvil
La polea móvil no es otra cosa que una polea de gancho conectada a una cuerda que tiene uno de sus extremos anclado a un punto fijo y el otro (extremo móvil) conectado a un mecanismo de tracción.
Estas poleas disponen de un sistema armadura-eje que les permite permanecer unidas a la carga y arrastrarla en su movimiento (al tirar de la cuerda la polea se mueve arrastrando la carga).

Polea compuesta
Polipasto
Es una combinación de poleas fijas y móviles recorridas por una sola cuerda que tiene uno de sus extremos anclado a un punto

Importancia de ellos en la vida cotidiana
Los operadores mecánicos son muy importantes, hoy en día la vida sin ellos sería mucho más difícil; pues poniendo un ejemplo habría crisis de transporte debido a que la rueda no existiría. Además los operadores mecánicos hacen más fácil nuestro día a día ya que gracias a ellos se nos facilita la realización de tareas y trabajos que nos son asignados.
En el área escolar se tienen por ejemplo la cremallera en los maletines y cartucheras implemento en los cuales podemos llevar nuestros útiles. En el área laboral principalmente en la construcción se utilizan muchos operadores mecánicos como poleas en las grúas y vehículos de demolición o de transporte de materiales los cuales utilizan palancas para su control y ruedas para su desplazamiento.
Los operadores mecánicos nos sirven par atrabajar, estudiar y hasta para divertirnos en un balancín o pescando y la diversión que es una de las actividades de las cuales mas gusta el ser humano los hace ser en mi opinión más importantes aun.
El transporte es el medio que hoy en día más utiliza operadores mecánicos nombrando algunos seria: poleas en el motor, ruedas para su desplazamiento y palanca para las velocidades. Y aunque la mayoría de los medios de transporte del mundo son contaminantes no se dejan de usar pues la crisis masiva de transporte seria impresionante y además también traería consigo crisis económicas.
La rueda además es sin duda el operador mecánico al que el ser humano más le ha sacado provecho en su historia y hoy en día lo sigue haciendo. Empezando desde los carruajes y carrozas pasando por las bicicletas y los trenes y llegando hasta hoy en día con los automóviles y las motocicletas.
Palanca:
Una palanca es la máquina simple de transmisión lineal que puede girar alrededor de un punto de apoyo. En esta barra existe un punto de aplicación de la fuerza (F), y un punto de aplicación de la resistencia, (R). Para resolver una palanca en equilibrio empleamos la expresión llamada ley de la palanca.
F.d=R.r
donde "d" es la distancia desde el punto de aplicación de la fuerza y "r" la distancia desde el punto de apoyo respecto a F y R. Tenemos tres tipos de palancas:
Palancas de primer género o de primer grado:
Tiene el punto de apoyo entre la fuerza y la resistencia entre sí. Mientras más cerca del lado de la potencia se encuentre el punto de apoyo, más fuerza se ejercerá y disminuye la resistencia a vencer. Por el contrario, si el punto de apoyo se encuentra más cerca de la resistencia esta puede ser mayor y la fuerza a aplicar será mucho menor. Y es menor la fuerza
Palancas de segundo género o de segundo grado:
Tienen la resistencia entre el punto de apoyo y la fuerza. Un ejemplo de palanca simple es cuando tomas un vaso con agua para beber.El punto de apoyo es el codo, la palanca tu brazo, y el peso a mover es el vaso con agua.
Las palancas de segundo género son utilizadas para desplazar objetos pesados con un mínimo de fuerza muscular. De seguro, habrás hecho uso de ellas posiblemente sin saber que estabas manipulando una palanca.
En este caso, la clave no está en levantar un objeto, como en el caso de las palancas de primer género, sino en desplazarlo de un lugar a otro. Posiblemente, si no hiciéramos uso del principio de la palanca y solo dependiéramos de nuestra fuerza nos resultaría muy difícil o imposible mover el objeto. Recordemos que las palancas pueden ser de primer, segundo o tercer género. Una herramienta con la que habitualmente te cruzas en cualquier obra en construcción y que emplea los preceptos físicos de las palancas de segunda generación es la carretilla. También los botes a remo se desplazan por el agua haciendo uso de este principio
Palanca de tercer grado:
son las que tienen la fuerza entre el punto de apoyo y la resistencia.
Mecanismos de transmisión del movimiento
En este caso, el tipo de movimiento que tiene el elemento de entrada del mecanismo (elemento motriz) coincide con el tipo de movimiento que tiene el elemento de salida (elemento conducido).
Los mecanismos de transmisión pueden ser, a su vez, agrupados en dos grandes grupos:
- Mecanismos de transmisión circular: En este caso, el elemento de entrada y el elemento de salida tienen movimiento circular. Ejemplo: Los sistemas de engranajes.
- Mecanismos de transmisión lineal: En este caso, el elemento de entrada y el elemento de salida tienen movimiento lineal. Ejemplo: La palanca.
Sistemas de poleas
Una polea es una rueda que tiene un ranura o acanaladura en su periferia, que gira alrededor de un eje que pasa por su centro. Esta ranura sirve para que, a través de ella, pase una cuerda que permite vencer una carga o resistencia R, atada a uno de sus extremos, ejerciendo una potencia o fuerza F, en el otro extremo. De este modo podemos elevar pesos de forma cómoda e, incluso, con menor esfuerzo, hasta cierta altura. Es un sistema de transmisión lineal puesto que resistencia y potencia poseen tal movimiento.
Podemos distinguir tres tipos básicos de poleas:
a) Polea fija: Como su nombre indica, consiste en una sola polea que está fija a algún lugar. Con ella no se
gana en Fuerza, pero se emplea para cambiar el sentido de la fuerza haciendo más cómodo el levantamiento de cargas al tirar hacia abajo en vez de para arriba, entre otros motivos porque nos podemos ayudar de nuestro propio peso para efectuar el esfuerzo. La fuerza que tenemos que hacer es igual al peso que tenemos que levantar (no hay ventaja mecánica) F=R. Así, por ejemplo, si deseo elevar una carga de 40 kg de peso, debo ejercer una fuerza en el otro extremo de la cuerda de, igualmente, 40 kg.

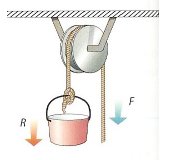
Polea móvil
b) Polea móvil: Es un conjunto de dos poleas, una de las cuales es fija, mientras que la otra es móvil. La polea móvil dispone de un sistema armadura-gancho que le permite arrastrar la carga consigo al tirar de la cuerda. La principal ventaja de este sistema de poleas es que el esfuerzo que se emplea para elevar la carga representa la mitad del que haría si emplease una polea fija. Así, por ejemplo, si quisiera elevar una carga de 40 kg de peso, basta con ejercer una fuerza de tan sólo 20 kg.
Esto supone que la cuerda que emplee para este mecanismo pueden ser la mitad de resistentes que en el caso anterior. Sin embargo, presenta una desventaja: El recorrido que debe hacer la cuerda para elevar la carga una altura determinada (h) debe ser el doble de la altura buscada (2h).
Aunque consta de dos poleas, en realidad se puede construir este mecanismo con una sola polea (observa la imagen de la derecha). Para ello se debe fijar un extremo de la cuerda, la carga a la polea y tirar de la cuerda de forma ascendente. Precisamente, este es la desventaja, mientras que en el caso de emplear dos poleas, este problema desaparece.
c) Sistemas de poleas compuestas: Existen sistemas con múltiples de poleas que pretenden obtener una gran ventaja mecánica, es decir, elevar grandes pesos con un bajo esfuerzo. Estos sistemas de poleas son diversos, aunque tienen algo en común, en cualquier caso se agrupan en grupos de poleas fijas y móviles: destacan los polipastos:
Polipasto: Este mecanismo está formado por grupos de poleas fijas y móviles, cada uno de ellos formado a su vez por un conjunto de
Polipasto
poleas de diámetro decreciente y ejes paralelos entre sí que se montan sobre la misma armadura, de modo que existe el mismo número de poleas fijas que móviles.
El extremo de la cuerda se sujeta al gancho de la armadura fija y se pasa alternativamente por las ranuras de las poleas —de menor a mayor diámetro en el caso del polispasto— comenzando por la del grupo móvil y terminando en la polea fija mayor o extrema donde quedará libre el tramo de cuerda del que se tira. La expresión que nos indica el esfuerzo que se debe realizar para vencer una carga (o resistencia) es las siguiente:
siendo n el número de poleas fijas del polipasto. Así, por ejemplo, si disponemos de un polipasto de tres poleas móviles, el esfuerzo que debo realizar para elevar una carga es seis veces menor (2n = 2·3 =6). Suponiendo que la carga sea, por poner un ejemplo, de 60 kg… el esfuerzo que deberíamos efectuar en este caso es de 10 kg.
Otro modelo de polipasto es aquel que emplea dos ramales distintos paralelos y a distinta altura en los que se alojan las poleas. En el ramal superior se sitúan las poleas fijas y en el de abajo las poleas móviles, conjuntamente con la carga.
Por último, es importante señalar que en este tipo de sistema, al igual que la polea móvil, debemos hacer un mayor recorrido con la cuerda; mayor recorrido cuanto mayor es el número de poleas.
Veamos por último un corto vídeo que nos ilustra algunos de los aspectos ya explicados.
Sistema simple de poleas con correa
El sistema de poleas con correa más simple consiste en dos poleas situadas a cierta distancia, que giran a la vez por efecto del rozamiento de una correa con ambas poleas. Las correas suelen ser cintas de cuero flexibles y resistentes. Es este un sistema de transmisión circular puesto que ambas poleas poseen movimiento circular.
En base a esta definición distinguimos claramente los siguientes elementos:
Sistema de poleas con correa
1. La polea motriz: también llamada polea conductora: Es la polea ajustada al eje que tiene movimiento propio, causado por un motor, manivela,
… En definitiva, este eje conductor posee el movimiento que deseamos transmitir.
2. Polea conducida: Es la polea ajustada al eje que tenemos que mover. Así, por ejemplo: en una lavadora este eje será aquel ajustado al tambor que contiene la ropa.
3. La correa de transmisión: Es una cinta o tira cerrada de cuero, caucho u otro material flexible que permite la transmisión del movimiento entre ambas poleas. La correa debe mantenerse lo suficientemente tensa pues, de otro modo, no cumpliría su cometido satisfactoriamente.
Según el tamaño de las poleas tenemos dos tipos:
1. Sistema reductor de velocidad: En este caso, la velocidad de la polea conducida ( o de salida) es menor que la velocidad de la polea motriz (o de salida). Esto se debe a que la polea conducida es mayor que la polea motriz.
En el siguiente vídeo se puede apreciar un mecanismo reductor de poleas con correa. Observa como la polea motriz es menor que la polea conducida la cual gira a menor velocidad.
Con la correa cruzada se puede lograr que el sentido de giro de la polea conducida sea contrario al de la polea motriz.
2. Sistema multiplicador de velocidad: En este caso, la velocidad de la polea conducida es mayor que la velocidad de la polea motriz. Esto se debe a que la polea conducida es menor que la polea motriz.
La velocidad de las ruedas se mide normalmente en revoluciones por minuto (rpm) o vueltas por minuto.
Los sistemas de poleas con correa presentan una serie de ventajas que hacen que hoy en día sean de uso habitual. Veamos algunas de ellas:
- Posibilidad de transmitir un movimiento circular entre dos ejes situados a grandes distancias entre sí.
- Funcionamiento suave y silencioso.
- Diseño sencillo y costo de fabricación bajo.
- Si el mecanismo se atasca la correa puede desprenderse y, de este modo, se para. Este efecto contribuye a la seguridad probada de muchas máquinas que emplean este mecanismo como pueden ser taladros industriales.
Sin embargo, también este sistema presenta algunos inconvenientes:
- La primera de las ventajas puede ser una desventaja, es decir, este mecanismo ocupa demasiado espacio.
- La correa puede patinar si la velocidad es muy alta con lo cual no se garantiza una transmisión efectiva.
- La potencia que se puede transmitir es limitada.
Aplicaciones: Este mecanismo es esencial en los motores de los automóviles, pues la transmisión circular entre diferentes ejes de los mismos se hacen con correas. Hemos oído hablar multitud de veces de la correa de transmisión (o de distribución) del coche. Pues bien, es esencial para el funcionamiento del ventilador de refrigeración, el alternador,…
Definición: Definimos la relación de transmisión (i) como la relación que existe entre la velocidad de la polea salida (n2) y la velocidad de la polea de entrada (n1).

expresión que es válida para todos los sistemas de transmisión circular que veremos en adelante.
La relación de transmisión, como su nombre indica, es una relación de dos cifras, no una división.
Ejemplo 1 : Supongamos un sistema reductor de modo que:
n1 = velocidad de la polea motriz (entrada) es de 400 rpm.
n2 = velocidad de la polea conducida (salida) es de 100 rpm.
En este caso, la relación de transmisión es:

(tras simplificar)
Una relación de transmisión 1:4 significa que la velocidad de la rueda de salida es cuatro veces menor que la de entrada.
Ejemplo 2 : Supongamos un sistema multiplicador de modo que:
n1 = velocidad de la polea motriz (entrada) es de 100 rpm.
n2 = velocidad de la polea conducida (salida) es de 500 rpm.
En este caso, la relación de transmisión es:
(tras simplificar)
Una relación de transmisión 5:1 significa que la velocidad de la rueda de salida es cinco veces mayor que la de entrada. Nota que la relación es 5/1 y no 5, pues ambos número nunca deben dividirse entre sí (todo lo más simplificarse).
La relación de transmisión también se puede calcular teniendo en cuenta el tamaño o diámetro de las poleas.

donde
d1 = diámetro de la polea motriz (entrada).
d2 = diámetro de la polea conducida (salida).
Se puede calcular las velocidad de las poleas a partir de los tamaños de las mismas
n1·d1 = n2·d2
expresión que también se puede colocar como…

Ejemplo:
Tengo un sistema de poleas de modo que:
La polea de salida tiene 40 cm de diámetro y la de entrada 2 cm de diámetro. Si la polea de entrada gira a 200 rpm
a) Halla la relación de transmisión
b) Halla la velocidad de la polea de salida
c) ¿Es un reductor o un multiplicador?
Datos:
n1 = velocidad de la polea entrada) es de 200 rpm.
n2 = velocidad de la polea salida es la incógnita
d1 = diámetro de la polea entrada es 2 cm
d2 = diámetro de la polea salida es 40 cm
a) 
b) n1·d1 = n2·d2 200 rpm·2 cm = n2·40 cm

c) Es un reductor porque la velocidad de la polea de salida es menor que la velocidad de la polea de entrada (n2 < n1).
Si quieres visualizar mejor los sistemas de poleas con correa, tienes a tu disposición un ejemplo de cada modelo a través de animaciones
En la siguiente animación observarás un mecanismo de poleas con correa reductor, suponiendo que la polea de la izquierda sea la motriz. Al ser el diámetro de la polea conducida d2 = 40 mm y el de la polea motriz d1 = 20 mm, la relación de transmisión de este sistema es
de este modo se puede concluir que dos giros de la polea motriz equivalen a un solo giro de la polea conducida.
En la siguiente animación podrás observar un mecanismo de poleas con correa multiplicador. El diámetro de la polea motriz es de d1=40 mm , mientras que la polea conducida tiene un diámetro de d2= 20 mm. Así pues la relación de transmisión de este sistema es
de este modo se puede concluir que un giro de la polea motriz equivale a dos giros de la polea conducida.
Ruedas de fricción
Sistema de transmisión por ruedas de fricción
Este mecanistmo de transmisión circular consiste en dos o más ruedas que se tocan entre sí montadas sobre ejes paralelos, de modo que, mediante la fuerza que produce el rozamiento entre ambas, es posible transmitir el movimiento giratorio entre los ejes, modificando, no sólo las características de velocidad, sino también el sentido de giro.
Este sistema tiene un inconveniente, solamente se puede usar cuando se transmiten pequeñas potencias, pues, por deslizamiento existe una pérdida de velocidad. Además, el uso continuo lleva al desgaste de las ruedas, a pesar de que las ruedas están revestidas de un material especial.Sin embargo, presenta dos claras ventajas. Por una parte el bajo coste que supone la fabricación del mecanismo y, por otro lado, es un mecanismo que ocupa poco espacio, al contrario que el sistema de poleas con correa.
La relación de transmisión toma la misma forma que para el sistema de poleas con correa, es decir,
n1·d1 = n2·d2
siendo…
n1 = velocidad de la rueda motriz.
n2 = velocidad de la rueda conducida
d1 = diámetro de la rueda motriz (entrada).
d2 = diámetro de la rueda conducida (salida).
de modo que, como en el caso del sistemas de poleas con correa, podemos encontrar sistemas reductores o multiplicadores de velocidad según el tamaño relativo entre las ruedas.
Aplicaciones: Es muy común en equipos de sonido y vídeo, pues las ruedas de fricción facilitan el avance de la cinta. También es común en impresoras para facilitar el avance del papel.
Transmisión de engranajes con cadena
Este es un mecanismo de transmisión circular que consta de una cadena sin fin (cerrada) cuyos eslabones engranan con ruedas dentadas (piñones) que están unidas a los ejes de los mecanismos conductor y conducido. Se comportan como las transmisiones mediante poleas y correa, pero con la ventaja de que, al ser las ruedas dentadas, la cadena no corre peligro de deslizarse. Además, la relación de transmisión se mantiene constante…precisamente, porque no existe deslizamiento y por si fuese poco tiene otra gran ventaja: la transmisión de grandes potencias (al contrario que el sistema de poleas con correas), lo que se traduce en una mayor eficiencia mecánica. Sin embargo, este mecanismo tiene inconvenientes frente al sistema de poleas: es más costoso, más ruidoso y necesita lubricación, por no hablar de la imposibilidad de invertir el giro de los engranajes Este mecanismo es un método de transmisión muy utilizado porque permite transmitir un movimiento giratorio entre dos ejes paralelos, que estén bastante separados. Es el mecanismo de transmisión que utilizan las bicicletas y motocicletas , y en muchas máquinas e instalaciones industriales.
Tren de engranajes
Un tren de engranajes consiste en la combinación de más de un par de engranajes. Es un sistema de transmisión circular muy común con múltiples y variadas aplicaciones. Un ejemplo significativo es la caja de cambios de un automóvil, compuesto por varios trenes de engranajes.¿por qué se usan trenes?
- Obtención de una relación de transmisión i, imposible de conseguir con un solo par de ruedas
- Obtención de una amplia gama de i en un mismo mecanismo
- Por motivos de espacio, debido a la necesidad de transmitir el movimiento entre ejes alejados
- Si se necesita cambiar la situación, orientación o sentido del movimiento del eje de salida
- Si se desea transmitir el movimiento de un eje a otros simultáneamente
En el siguiente vídeo puedes observar un tren de engranajes compuesto por cuatro ejes (o árboles).
Tornillo sinfín y rueda dentada
El tornillo sinfin es un mecanismo de transmisión circular compuesto por dos elementos: el tornillo (sinfín), que actúa como elemento de entrada (o motriz) y la rueda dentada, que actúa como elemento de salida (o conducido) y que algunos autores llaman corona. La rosca del tornillo engrana con los dientes de la rueda de modo que los ejes de transmisión de ambos son perpendiculares entre sí.

El funcionamiento es muy simple: por cada vuelta del tornillo, el engranaje gira un solo diente o lo que es lo mismo, para que la rueda dé una vuelta completa, es necesario que el tornillo gire tantas veces como dientes tiene el engranaje. Se puede deducir de todo ello que el sistema posee una relación de transmisión muy baja, o lo que es lo mismo, es un excelente reductor de velocidad y, por lo tanto, posee elevada ganancia mecánica. Además de esto, posee otra gran ventaja, y es el reducido espacio que ocupa.
El tornillo es considerado una rueda dentada con un solo diente que ha sido tallado helicoidalmente (en forma de hélice). A partir de esta idea, se puede deducir la expresión que calcula la relación de transmisión:

donde Z representa el número de dientes del engranaje.

Veamos un ejemplo: supongamos que la rueda tiene 60 dientes. En este caso, el tornillo debe dar 60 vueltas para el engranaje complete una sola vuelta y, por lo tanto, la relación de transmisión del mecanismo es

Este mecanismo no es reversible, es decir, la rueda no puede mover el tornillo porque se bloquea.
Aplicaciones:

El tornillo sinfín en las clavijas de una guitarra
En nuestra vida cotidiana lo podemos ver claramente en las clavijas de una guitarra. En este caso, la cuerda es recogida con presición por eje de transmisión de una pequeña rueda dentada que es conducida por un tornillo que gira gracias a la acción de la clavija.
No podemos olvidar el limpiaparabrisas, que se acciona gracias a este mecanismo.
En los siguiente vídeos veréis el mecanismo en acción. En ambos observa lo lento que gira la rueda dentada y fíjate cómo en el primer vídeo se intenta girar el tornillo accionando el engranaje. Es imposible.
Vodpod videos no longer available.
An
Correa de transmisión

Se conoce como correa de transmisión a un tipo de transmisión mecánica basado en la unión de dos o más ruedas, sujetas a un movimiento de rotación, por medio de una cinta o correa continua, la cual abraza a las ruedas ejerciendo fuerza de fricción suministrándoles energía desde la rueda motriz.
Es importante destacar que las correas de trasmisión basan su funcionamiento fundamentalmente en las fuerzas de fricción, esto las diferencia de otros medios flexibles de transmisión mecánica, como lo son las cadenas de transmisión y las correas dentadas las cuales se basan en la interferencia mecánica entre los distintos elementos de la transmisión.
Las correas de transmisión son generalmente hechas de goma, y se pueden clasificar en dos tipos: planas y trapezoidales.
Correas planas
Las correas planas se caracterizan por tener por sección transversal un rectángulo. Fueron el primer tipo de correas de transmisión utilizadas. Pero actualmente han sido sustituidas por las correas trapezoidales. Son todavía estudiadas porque su funcionamiento representa la física básica de todas las correas de trasmisión.

Correas multipista o estriada
Actualmente están sustituyendo a las trapezoidales, ya que permiten el paso por las poleas tanto de la cara estriada (de trabajo) como de la cara plana inversa, permite recorridos mucho más largos y por lo tanto arrastrar muchos más sistemas. Además permiten el montaje de un tensor automático. En las aplicaciones más conocidas, la de los automóviles o vehículos industriales, pueden arrastrar por ejemplo a la vez: alternador, servodirección, bomba de agua, compresor de aire acondicionado o ventilador (este último solo en tracción trasera e industriales).
Generalidades
Las características más importantes de las correas de trasmisión se obtienen a partir un balance de fuerzas en su paso por la poleas, ya que en este paso son mayores las solicitación de la correa. Las fuerzas que actúan sobre la correa en este paso son::
- Fuerzas de fricción:
- Fuerzas centrífugas:
- La tensión bajo la cual se encuentra la correa:
- La fuerza normal de contacto que ejerce la polea sobre la correa:




Si analizamos un elemento diferencial de la correa, en su paso por una polea obtendremos las siguientes sumas de fuerzas:
- Fuerzas en el eje horizontal:

- conociendo las propiedades la función coseno, podemos aproximar los término que contienen a 1, entonces concluimos que cada incremento en la tensión es contrario al incremento de la fricción:
- Este hecho es fundamental, porque determina que la tensión en la correa aumenta si nos desplazamos en sentido contrario a la rotación de la rueda de estudio.



- Fuerzas en el eje vertical:
- igual que anteriormente aprovechamos las propiedades de la función seno para igualar
- Ahora consideramos que el producto de diferenciales es tan pequeño como para ser despreciado y lo igualemos a cero. Luego expresamos a la fuerza normal en función de la fricción () y sustituimos a la fuerza.





Correas trapezoidales o en "V"
A diferencia de las planas, su sección transversal es un trapecio. Esta forma es un artificio para aumentar las fuerzas de fricción entre la correa y las poleas con que interactúan. Otra versión es la trapezoidal dentada que posibilita un mejor ajuste a radios de polea menores.
- Las correas en V se fabrican usualmente en tela y refuerzo de cordón, generalmente de algodón, rayón o nylon, y se impregnan de caucho (o hule).
- Se usan con poleas ranuradas de sección similar y distancias entre centros más cortas.
- Son ligeramente menos eficientes que las planas, pero varias pueden montarse paralelas en poleas ranuradas especiales; por tanto, constituyen así una transmisión múltiple.
- Las correas trapezoidales son, entre los tipos básicos de correas, las que han adquirido mayor aplicación en la industria.
- La capacidad de carga de una correa trapecial es mayor que la de una plana debido al mayor coeficiente reducido de fricción.
Ventaja de las Transmisiones por correas en "v"
- Instalación económica y fácil
- Buena eficiencia mecánica
- Su operación es silenciosa y suave
- Larga expectativa de vida si son bien instaladas
- https://es.wikipedia.org/wiki/Correa_de_transmisi%C3%B3n
Reductores de velocidad
Toda máquina cuyo movimiento sea generado por un motor (ya sea eléctrico, de explosión u otro) necesita que la velocidad de dicho motor se adapte a la velocidad necesaria para el buen funcionamiento de la máquina. Además de esta adaptación de velocidad, se deben contemplar otros factores como la potencia mecánica a transmitir, la potencia térmica, rendimientos mecánicos (estáticos y dinámicos).
Esta adaptación se realiza generalmente con uno o varios pares de engranajes que adaptan la velocidad y potencia mecánica montados en un cuerpo compacto denominado reductor de velocidad aunque en algunos países hispano parlantes también se le denomina caja reductora.
Tipos de motorreductor
Los reductores de velocidad se suelen clasificar de un modo bastante anárquico, solapándose en algunos casos las definiciones de modo intrínseco y en otros casos hay que usar diversas clasificaciones para definirlos.
Clasificación por tipo de engranajes
Los reductores se pueden clasificar por la tipología de sus engranajes, las clasificaciones más usuales son: Sin fin-Corona, engranajes, planetarios y cicloidales.
Reductores de velocidad de Sin fin-Corona
Es quizás el tipo de reductor de velocidad más sencillo, se compone de una corona dentada, normalmente de bronce en cuyo centro se ha embutido un eje de acero (eje lento), esta corona está en contacto permanente con un husillo de acero en forma de tornillo sinfín. Una vuelta del tornillo sinfín provoca el avance de un diente de la corona y en consecuencia la reducción de velocidad. La reducción de velocidad de una corona sinfín se calcula con el producto del número de dientes de la corona por el número de entradas del tornillo sinfín.
Paradójicamente es el tipo de reductor de velocidad más usado y comercializado a la par que todas las tendencias de ingeniería lo consideran obsoleto por sus grandes defectos que son, el bajo rendimiento energético y la pérdida de tiempo entre ciclos1
Reductores de velocidad de engranajes
Los reductores de engranajes son aquellos en que toda la transmisión mecánica se realiza por pares de engranajes de cualquier tipo excepto los basados en tornillo sin fin. Sus ventajas son el mayor rendimiento energético, menor mantenimiento y menor tamaño.Por ejemplo: un mecanismo de elevado de anclas
.
Reductores de velocidad Planetarios
Los reductores de engranaje con la particularidad de que no están compuestos de pares, sino de una disposición algo distinta; y sirven para diferentes tipos de variaciones de velocidad.
Hay dos tipos de engranajes planetarios para reducir la velocidad de la hélice con respecto a la del cigüeñal.
Un sistema tiene el engranaje principal fijado rígidamente a la sección delantera del motor, y una corona interna es impulsada por el cigüeñal. El piñón está unido al eje de lo que quiere mover y montado en ella, y son una serie de piñones que cuando el cigüeñal gira, los piñones giran en torno al principal fijo, en compañía de la hélice en la misma dirección, pero a una velocidad reducida.
Los reductores de velocidad de engranajes planetarios, interiores o anulares son variaciones del engranaje recto en los que los dientes están tallados en la parte interior de un anillo o de una rueda con reborde, en vez de en el exterior. Los engranajes interiores suelen ser impulsados por un piñón, (también llamado piñón Sol, que es un engranaje pequeño con pocos dientes). Este tipo de engrane mantiene el sentido de la velocidad angular. El tallado de estos engranajes se realiza mediante talladoras mor tajadoras de generación.
La eficiencia de este sistema de reductores planetarios es igual a 0.98^(#etapas); es decir si tiene 5 etapas de reducción la eficiencia de este reductor seria de 0.98^5 lo que es igual a 0,904 o 90,4%.
Debido a que tienen más dientes en contacto que los otros tipos de reductores, son capaces de transferir / soportar más torque; por lo que su uso en la industria cada vez es más difundido. Ya que generalmente un reductor convencional de flechas paralelas en aplicaciones de alto torque debe de recurrir a arreglos de corona / cadenas lo cual vuelve no solo requiere de más tamaño sino que también implicara el uso de lubricantes para el arreglo corona / cadena.
La selección de reductores planetarios se hace como la de cualquier reductor, en función del torque Newton-metro.
Como cualquier reductor tienen engranajes y rodamientos, los engranajes también son afectos a la fricción y agotamiento de los dientes.
Debido a que los fabricantes utilizan diferentes formas de presentación del tiempo de operación para sus engranajes y del torque máximo que soportan, la ISO tiene estándares para regular esto:
ISO 6636 para los engranajes,
ISO 281 para los rodamientos e
UNI 7670 para los ejes.
De esta forma se pueden comparar realmente las especificaciones técnicas de los reductores y se puede proyectar un tiempo de operación antes de fallo de cualquiera de los componentes principales del reductor, (ya sea planetario o flechas paralelas).
Clasificación por disposición de los ejes lento y rápido
Los reductores se pueden clasificar por la posición relativa del eje lento del reductor con respecto al eje rápido del mismo, las clasificaciones mas usuales son; paralelos, ortogonales y coaxiales.
Clasificación por sistema de fijación
Los reductores se pueden clasificar por sus sistema de fijación, fijo o pendular.
Características de los reductores de velocidad
La fabricación o selección de un reductor de velocidad es algo sumamente complejo en algunas ocasiones dada la gran cantidad de parámetros a tener en cuenta. Los principales son:
El par motor, es la potencia que puede transmitir un motor en cada giro . También llamado "Torque"

Par nominal
Es el par transmisible por el reductor de velocidad con una carga uniforme y continua; está íntimamente relacionado con la velocidad de entrada y la velocidad de salida. Su unidad en el SI es el N m (Newton metro).
Par resistente
Representa el par requerido para el correcto funcionamiento de la máquina a la que el reductor de velocidad va a ser acoplado. Su unidad en el SI es el N m.
Par de cálculo
Es el producto del par resistente y el factor de servicio requerido por la máquina a la que el reductor de velocidad va a ser acoplado. Su unidad en el SI es el N m.
Potencia
Expresada normalmente en kW (kilovatios) la potencia eléctrica es considerada en dos niveles distintos: la potencia eléctrica aplicada y la potencia útil; esta última es el producto de la potencia aplicada al ser multiplicado por cada uno de los rendimientos de cada par de engranajes del reductor de velocidad. 1720/28 rpm potencia de 3 12.2 kW A 500 m .
Potencia térmica
Los rendimientos de los trenes de engranajes tienen una pérdida de potencia en forma de calor que tiene que ser disipada por el cuerpo de los reductores de velocidad. Puede ocurrir que la potencia transmisible mecánicamente provoque un calor en el reductor de velocidad a unos niveles que impiden su funcionamiento normal.
La potencia térmica, expresada en kW, indica la potencia eléctrica aplicada en el eje rápido del reductor de velocidad que este es capaz de transmitir sin limitación térmica. Su unidad en el SI es Pwt Los reductores de velocidad son aquellos componentes de una máquina que mediante rozamiento consiguen reducir la velocidad de dicha máquina o vehículo.
Biela-manivela
Eje acodado en forma de manivela en el que se acopla un vástago (biela) de modo que al girar el eje la biela sube y baja o va y viene. Transmite el momiento alternativo en circular o al revés, permite la transformación del movimiento en ambos sentidos.

Cigüeñal
Eje acodado con más de una manivela en cada una de ellas, va una biela. Se emplea en los motores de combustión en los cuales en las bielas van colocados los pistones. Así el movimiento de subida y bajada de los pistones por la combustión de la gasolina o gasoil se transforma en un movimiento circular, que con la ayuda de un volante de inercia se mantiene regular.

Leva
Es una rueda no circular (ahuevada) con un saliente que transforma el movimiento circular en lineal, obteniendo movimiento de vaiven., la leva solo transmite la fuerza en un sentido, la reuperación de la posición del elemento seguidor se consigue mediante un muelle o por gravedad.

Excéntrica
Es una rueda cuyo eje de giro no coincide con el centro, transformando el movimiento circular en lineal del elemento en contacto con ella. El desplazamiento del elemento es suave y se transmite en un solo sentido.
Polea:
La polea es una rueda que gira libremente alrededor de su eje. Está provista de un canal en su superf
icie para que sirva de guía a una cuerda, correa o cadena a la que recibe o a la que le da el movimiento.
F=R
Típos de polea:
Polea simple: polea simple fija, polea simple móvil.
Polea compuesta: polipasto
Polea simple:
Esta máquina simple se emplea para levantar cargas a una cierta altura. La polea simple está formada por una polea fija al techo, sobre la cual puede deslizarse una cuerda. Se usa, por ejemplo, para subir objetos a los edificios o sacar agua de los pozos. Al estirar desde un extremo de la cuerda, la polea simple se encarga solamente de invertir el sentido de la fuerza aplicada. Por lo tanto no existe ventaja mecánica, sólo puede haber pérdidas debidas al rozamiento.
Polea simple fija:
En las poleas fijas, las tensiones (fuerzas) a ambos lados de la cuerda son iguales (T1 = T2), por lo tanto no reduce la fuerza necesaria para levantar un cuerpo. Sin embargo permite cambiar el ángulo en el que se aplique esa fuerza y transmitirla hacia el otro lado de la cuerda.
Polea simple móvil:
La polea móvil no es otra cosa que una polea de gancho conectada a una cuerda que tiene uno de sus extremos anclado a un punto fijo y el otro (extremo móvil) conectado a un mecanismo de tracción.
Estas poleas disponen de un sistema armadura-eje que les permite permanecer unidas a la carga y arrastrarla en su movimiento (al tirar de la cuerda la polea se mueve arrastrando la carga).
Polea compuesta:
Son aquellas donde se usan más de dos poleas en el sistema, pueden ser una fija y una móvil o dos fijas y una móvil, etc. Tirar de una cuerda de arriba hacia abajo resulta más fácil que hacerlo desde abajo hacia arriba. Para cambiar la dirección del esfuerzo, a la polea móvil se le agrega una polea fija proporcionando una ventaja mecánica.
LEGO:
Fundación: 10 de agosto de 1932, Billund, Dinamarca
Propietario: Familia Christiansen (75%); Fundación LEGO (25%)
Director ejecutivo: Niels B. Christiansen (1 de oct. de 2017–)
Forma legal: Sociedad por acciones
PERFIL DE LA COMPAÑÍA
Los productos LEGO® se venden por todo el planeta.

Somos uno de los principales fabricantes de juguetes a nivel mundial y el más importante de juguetes de construcción.
Los niños de todo el mundo pasan más de 5.000 millones de horas al año jugando con los bricks LEGO.
En el perfil de nuestra compañía puede encontrar los datos más significativos acerca de esta:
· Principales cifras de negocio de LEGO Group.
· La historia de LEGO Group.
· La historia de las minifiguras.
· Cómo se fabrican los bricks LEGO.
· Uso de la marca LEGO
UN EJEMPLO DE UN PROYECTO EN LEGO
| GUITARRA ELECTRICA | INSTRUCCIONES |
1
  
2
  
3
  
4
  El sensor ultrasónico necesita algo duro y plano para medir la distancia, por lo que para eso es esta placa deslizante. El sensor ultrasónico no funciona cuando algo está demasiado cerca de él, por lo que las dos clavijas que sobresalen del cuello cerca del sensor evitan que la placa se acerque a menos de 1 pulgada del sensor. El sensor ultrasónico necesita algo duro y plano para medir la distancia, por lo que para eso es esta placa deslizante. El sensor ultrasónico no funciona cuando algo está demasiado cerca de él, por lo que las dos clavijas que sobresalen del cuello cerca del sensor evitan que la placa se acerque a menos de 1 pulgada del sensor. |

5
 
6
  
7
   
8
    
9
 Primero conecte el cable al sensor ultrasónico como se muestra a continuación. Luego, conecte el cable al puerto 4 en el NXT (esto será un ajuste perfecto), luego pase alrededor de la clavija como se muestra. Primero conecte el cable al sensor ultrasónico como se muestra a continuación. Luego, conecte el cable al puerto 4 en el NXT (esto será un ajuste perfecto), luego pase alrededor de la clavija como se muestra.
| ||||||


|
Cómo tocar tu guitarra eléctrica
 |  |
| Sostenga la placa deslizante con la mano izquierda con la mano alejada del sensor ultrasónico. Deslice la placa hacia arriba y hacia abajo en el cuello de la guitarra para seleccionar la nota a tocar, luego presione el botón naranja del NXT con el pulgar derecho para tocar la nota. La pantalla del NXT mostrará el nombre de la nota o acorde que se reproducirá a medida que se mueva la placa deslizante |
| Las notas de la guitarra eléctrica
Los programas para la guitarra eléctrica tocan una serie de notas o acordes conocidos como la "escala de blues".
Estas notas se usan a menudo en blues y música rock heavy metal. Las notas en esta escala son:
En un teclado de piano, estas notas son:

Con estas notas, es fácil improvisar o "jugar" incluso si no sabes nada sobre música.
|
¿Qué nos puede enseñar LEGO en las aulas?
¿Quién no ha jugado con LEGO cuando era peque? Esas piezas de colores son irresistibles y gustan a todos y todas: con ellas constriumos puentes, naves espaciales, casas... o destruimos las creaciones de alguien :P No solo tienen una larga historia, y no solo los conocemos muy bien: tienen un gran poder didáctico y mucha potencialidad en las aulas que podemos empezar a aprovechar.

LEGO fueron creadas en Dinamarca en la década de 1940. Su popularidad les ha llegado a diseñar productos específicamente didácticos; etimológicamente, proviene de leg godt, que significa "jugar bien".
Usos didácticos:
- Ayuda a desarrollar el pensamiento tridimensional y la visión espacial
- Es útil para aprender a trabajar con instrucciones, de modo que contribuye a la alfabetización lingüística en las primeras etapas de la infancia
- Utilizado colaborativamente, trabajamos la comunicación y la síntesis de las opiniones de miembro dentro de cada grupo
- Desarrolla la creatividad, tanto en el juego individual como grupal
- Desarrolla, muy especialmente, las habilidades motoras finas y la coordinación ojo-mano
- Es una herramienta muy divertida que puedes usar en metodologías activas y lúdicas para matemáticas o geometría
- También puede servir para ejercicios en los que hace falta duplicar patrones, incluso patrones muy complejos
- Incide sobre la capacidad de resolución ed problemas: te obliga a desarrollar soluciones; es muy versátil y se suele aplicar, especialmente, en materias científico-técnicas
- Ayuda a desarrollar el pensamiento lógico
- Los niños, niñas y personas adultas pueden aprender o mejorar sus habilidades de planificación, evaluación y solución de problemas

{kind=link}
{kind=link}
{kind=link}
{kind=link}
No hay comentarios.:
Publicar un comentario